Train and Play Your Robot
Now, if you want to train your own robot on task, here is the tutorial. You are welcome. In this tutorial, I will train the Fetch Robot, which is initially not in the IsaacLab, to do the Reach task in the template.
Prepare Your Robot for the Task
For simplicity, you can copy the Reach task from the IsaacLab and place it into the tasks folder of the template. As a result, your tasks folder should be like following structure:
tasks/__init__.pylocomotion/- …
manipulation/__init__.pyreach/config/mdp/__init__.pyreach_env_cfg.py
In the reach_env_cfg.py, as mentioned before, this configuration file contains only the task detail without the robot, so we are not going to modify too much thing here. Because, we have mdp directory here, so we want reach_env_cfg.py actually to use the mdp directory here, we will modify reach_env_cfg.py only the following parts
# import omni.isaac.lab_tasks.manager_based.manipulation.reach.mdp as mdp
import [your template name].tasks.manipulation.reach.mdp as mdp
Reset the init_state
# world
ground = AssetBaseCfg(
prim_path="/World/ground",
spawn=sim_utils.GroundPlaneCfg(),
init_state=AssetBaseCfg.InitialStateCfg(pos=(0.0, 0.0, 0.0)),
)
Then you also need to comment out the table because Fetch will have collision with it
# table = AssetBaseCfg(
# prim_path="{ENV_REGEX_NS}/Table",
# spawn=sim_utils.UsdFileCfg(
# usd_path=f"{ISAAC_NUCLEUS_DIR}/Props/Mounts/SeattleLabTable/table_instanceable.usd",
# ),
# init_state=AssetBaseCfg.InitialStateCfg(pos=(0.55, 0.0, 0.0), rot=(0.70711, 0.0, 0.0, 0.70711)),
# )
Then, we can enter the config folder. If you want, you can delete franka and ur_10 because they may cause warning about the confliction with the IsaacLab.
For Fetch robot, we need to create a fetch folder here. Similar to other joint_pos_env_cfg.py, we need to define both configuration classes for the tasks. To do that, we need to import both mdp and ReachEnvCfg from the task.
import [your template name].tasks.manipulation.reach.mdp as mdp
from [your template name].tasks.manipulation.reach.reach_env_cfg import ReachEnvCfg
Because ReachEnvCfg does not define the robot configuration yet, we need to define it here. I will use Fetch Robot as the example
## Import your custom robot configuration here.
import omni.isaac.lab.sim as sim_utils
from omni.isaac.lab.actuators import ImplicitActuatorCfg
from omni.isaac.lab.assets.articulation import ArticulationCfg
FETCH_USD_PATH = f"{ISAACLAB_ASSETS_DATA_DIR}/Robots/FetchRobot/Fetch/fetch.usd"
FETCH_CFG = ArticulationCfg(
spawn=sim_utils.UsdFileCfg(
usd_path=FETCH_USD_PATH,
articulation_props=sim_utils.ArticulationRootPropertiesCfg(enabled_self_collisions=False),
activate_contact_sensors=False,
),
init_state=ArticulationCfg.InitialStateCfg(
joint_pos={
# base
"r_wheel_joint": 0.0,
"l_wheel_joint": 0.0,
"head_pan_joint": 0.0,
"head_tilt_joint": 0.0,
# fetch arm
"torso_lift_joint": 0.2,
"shoulder_pan_joint": -1.28,
"shoulder_lift_joint": 1.51,
"upperarm_roll_joint": 0.35,
"elbow_flex_joint": 1.81,
"forearm_roll_joint": 0.0,
"wrist_flex_joint": 1.47,
"wrist_roll_joint": 0.0,
# # tool
"r_gripper_finger_joint": 0.01,
"l_gripper_finger_joint": 0.01,
},
joint_vel={".*": 0.0},
),
actuators={
"fetch_torso": ImplicitActuatorCfg(
joint_names_expr=["torso_lift_joint"],
effort_limit=1000.0,
velocity_limit=1.0,
stiffness=1e5,
damping=1e3,
),
"fetch_arm": ImplicitActuatorCfg(
joint_names_expr=["shoulder_pan_joint", "shoulder_lift_joint", "upperarm_roll_joint", "elbow_flex_joint", "forearm_roll_joint", "wrist_flex_joint", "wrist_roll_joint"],
effort_limit=87.0,
velocity_limit=100.0,
stiffness=1000.0,
damping=50.0,
),
"fetch_hand": ImplicitActuatorCfg(
joint_names_expr=["r_gripper_finger_joint", "l_gripper_finger_joint"],
effort_limit=100.0,
velocity_limit=0.2,
stiffness=500,
damping=50,
),
"fetch_head": ImplicitActuatorCfg(
joint_names_expr=["head_pan_joint", "head_tilt_joint"],
effort_limit=10.0,
velocity_limit=0.2,
stiffness=100,
damping=40,
),
},
)
I suggest you provide your robot configuration here because robot may have different initial state for different tasks. For those actuators’ parameter, you need to tune them close enough to the real robot. That is important for training later.
Then you can create the complete task configuration class.
@configclass
class FetchReachEnvCfg(ReachEnvCfg):
def __post_init__(self):
# post init of parent
super().__post_init__()
# switch robot to Fetch
self.scene.robot = FETCH_CFG.replace(prim_path="{ENV_REGEX_NS}/Robot")
# override events
self.events.reset_robot_joints.params["position_range"] = (-0.1, 0.1)
# override rewards
self.rewards.end_effector_position_tracking.params["asset_cfg"].body_names = ["wrist_roll_link"]
self.rewards.end_effector_position_tracking_fine_grained.params["asset_cfg"].body_names = ["wrist_roll_link"]
self.rewards.end_effector_orientation_tracking.params["asset_cfg"].body_names = ["wrist_roll_link"]
# override actions
self.actions.arm_action = mdp.JointPositionActionCfg(
asset_name="robot", joint_names=[".*"], scale=0.5, use_default_offset=True
)
# override command generator body
# end-effector is along x-direction
self.commands.ee_pose.body_name = "wrist_roll_link"
self.commands.ee_pose.ranges.pitch = (math.pi / 2, math.pi / 2)
...
Here, you need to declare which link of the robot as the end-effector.
Then, you need to provide the configurations for each RL library, and you can use the example from IsaacLab by changing reach_ur10 to reach_fetch in them. You must provide the configuration file for rsl_rl here. Otherwise, there will be error.
Now, you can register your task in __init__.py
# Copyright (c) 2022-2024, The Isaac Lab Project Developers.
# All rights reserved.
#
# SPDX-License-Identifier: BSD-3-Clause
import gymnasium as gym
from . import agents, joint_pos_env_cfg
##
# Register Gym environments.
##
gym.register(
id="Isaac-Reach-Fetch-v0",
entry_point="omni.isaac.lab.envs:ManagerBasedRLEnv",
disable_env_checker=True,
kwargs={
"env_cfg_entry_point": joint_pos_env_cfg.FetchReachEnvCfg,
"rl_games_cfg_entry_point": f"{agents.__name__}:rl_games_ppo_cfg.yaml",
"rsl_rl_cfg_entry_point": f"{agents.__name__}.rsl_rl_ppo_cfg:FetchReachPPORunnerCfg",
"skrl_cfg_entry_point": f"{agents.__name__}:skrl_ppo_cfg.yaml",
},
)
gym.register(
id="Isaac-Reach-Fetch-Play-v0",
entry_point="omni.isaac.lab.envs:ManagerBasedRLEnv",
disable_env_checker=True,
kwargs={
"env_cfg_entry_point": joint_pos_env_cfg.FetchReachEnvCfg_PLAY,
"rl_games_cfg_entry_point": f"{agents.__name__}:rl_games_ppo_cfg.yaml",
"rsl_rl_cfg_entry_point": f"{agents.__name__}.rsl_rl_ppo_cfg:FetchReachPPORunnerCfg",
"skrl_cfg_entry_point": f"{agents.__name__}:skrl_ppo_cfg.yaml",
},
)
Because we create our task in template, the script list_envs.py will not show it.
Once you have done the task, you need to setup your python package by
python -m pip install -e exts/[your template name]/.
Train Robot
Because we develop in the template, we need to setup the RL library interface to train. Go to the scripts, you can place the RL library interface there. You can copy the examples from here. Then, you need to modify the following part to make the train script to find import your tasks.
# import omni.isaac.lab_tasks # noqa: F401
import [your template name].tasks
So now you can train by the following command in the root of template
python scripts/skrl/train.py --task [your task name ] --headless
Visualize the Training
You can run the following command to visualize the training
tensorboard --logdir logs/[rl library]/[your task name]/
Then, you can open the browser and go to localhost:6006 to see the training result.
Play Robot
Similar to the Training, you need to modify the following part in the play.py
# import omni.isaac.lab_tasks # noqa: F401
import [your template name].tasks
Then, you can check your trained policy with
python scripts/skrl/play.py --task [your task name] --num_envs 32 --checkpoint [/PATH/TO/model.pt]
Here is the example of my result
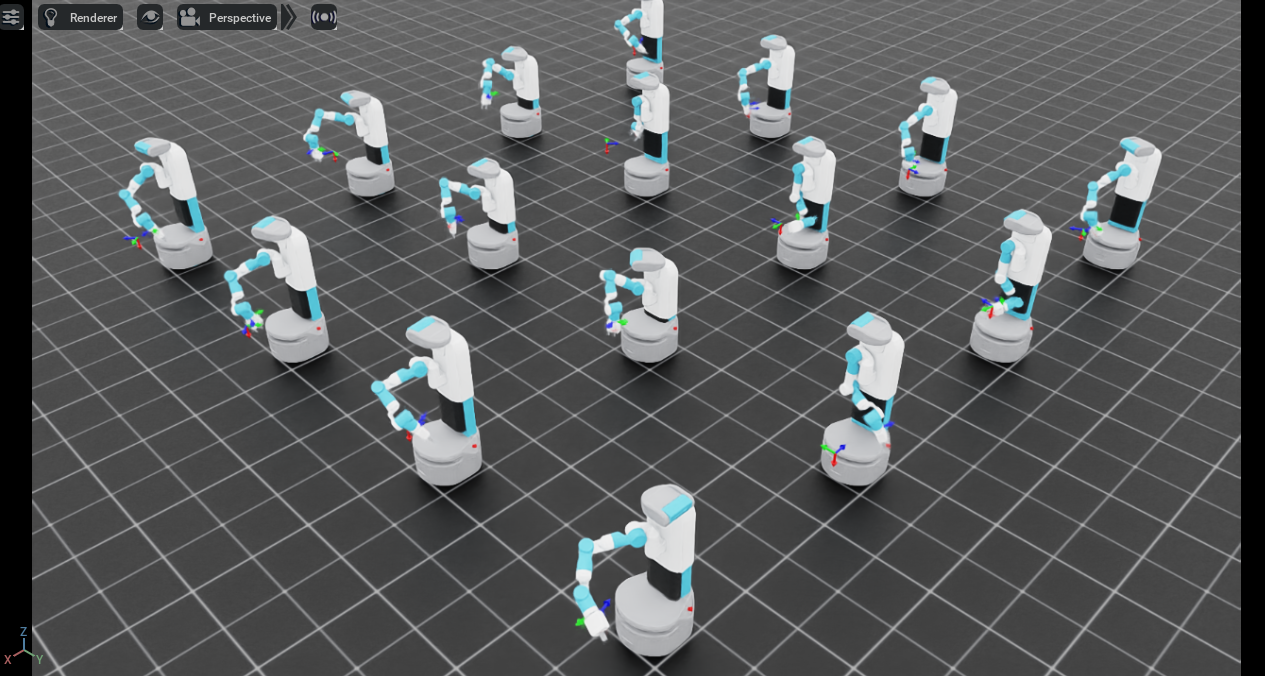
Here is the example code
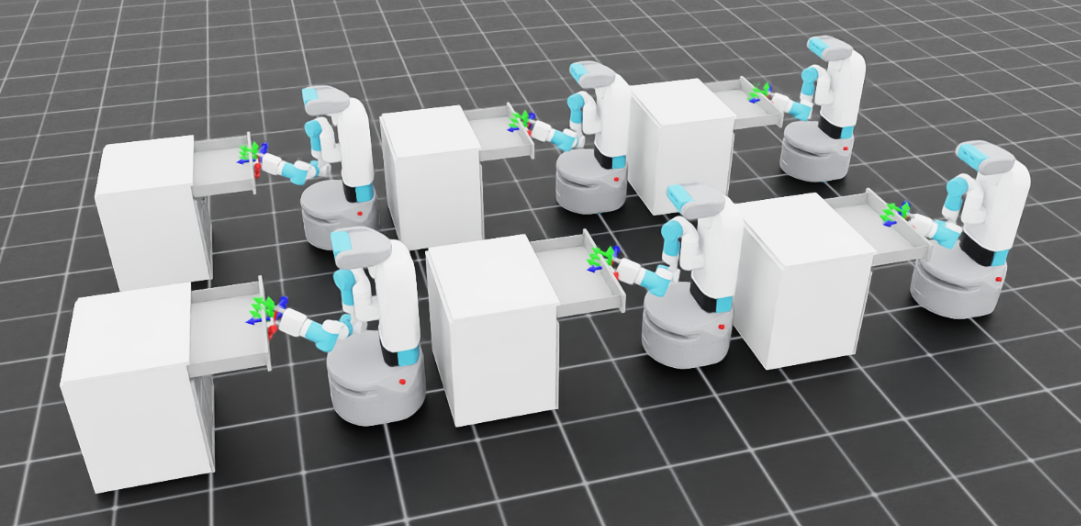
Here is the example of using Fetch robot to open the drawer.