Motion Planning in Foliated Manifolds using Repetition Roadmap
Robotics: Science and Systems (RSS) 2024
Jiaming Hu1*, Shrutheesh Raman Iyer1,2*, Jiawei Wang1, Henrik I Christensen1
1University of California, San Diego, 2Aurora Operations, Inc
Abstract
Numerous classes of robotics motion planning problems involve searching in constrained configuration spaces where the constraints change during different stages of the motion, and these kinds of motion planning problems are named multi-modal problems. The most common method to solve these problems is to represent them as a set of manifolds and search for a trajectory across them. Often, instead of using manifolds alone, foliated manifolds, which are a union of disjoint manifolds, are a better way to model the manipulation problem. However, the complexity of planning in foliated manifolds is significant due to the increased number of manifolds, hard task constraints, and complex environments. To tackle these challenges, we propose an efficient planning framework that leverages a dynamic roadmap structure to learn from accumulated experience acquired during previous planning attempts in similar foliated manifolds. When planning in a new foliated manifold, this experience, captured in configuration distributions and an atlas, which are tangential charts approximating the new manifold with constraints, is effectively utilized to guide motion planning. We demonstrate the framework's performance for manipulation problems with different foliated manifold structures in simulation and real-world scenarios.
Video
Planning in Foliated Manifolds
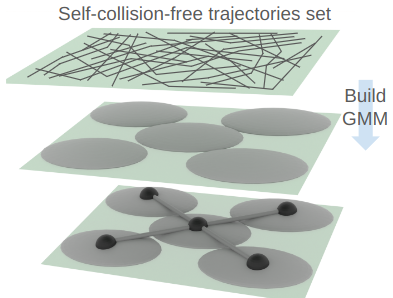
Our study introduces the FoliatedRepMap, a framework designed to incorporate motion planning experience collected from prior foliated manifolds and continuously update itself after each motion planning iteration.
Updating Foliated Repetition Roadmap
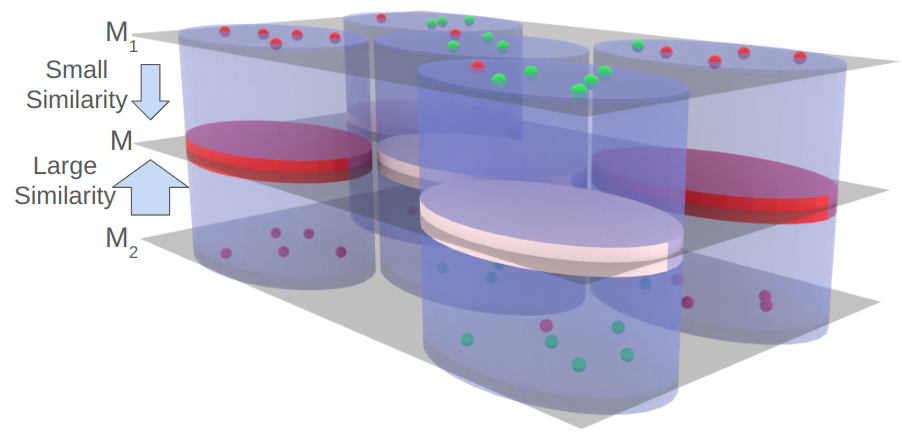
After motion planning in a foliated manifold, FoliatedRepMap must be updated by the sampled data in this manifold as experience to guide the planning step in the next iteration.
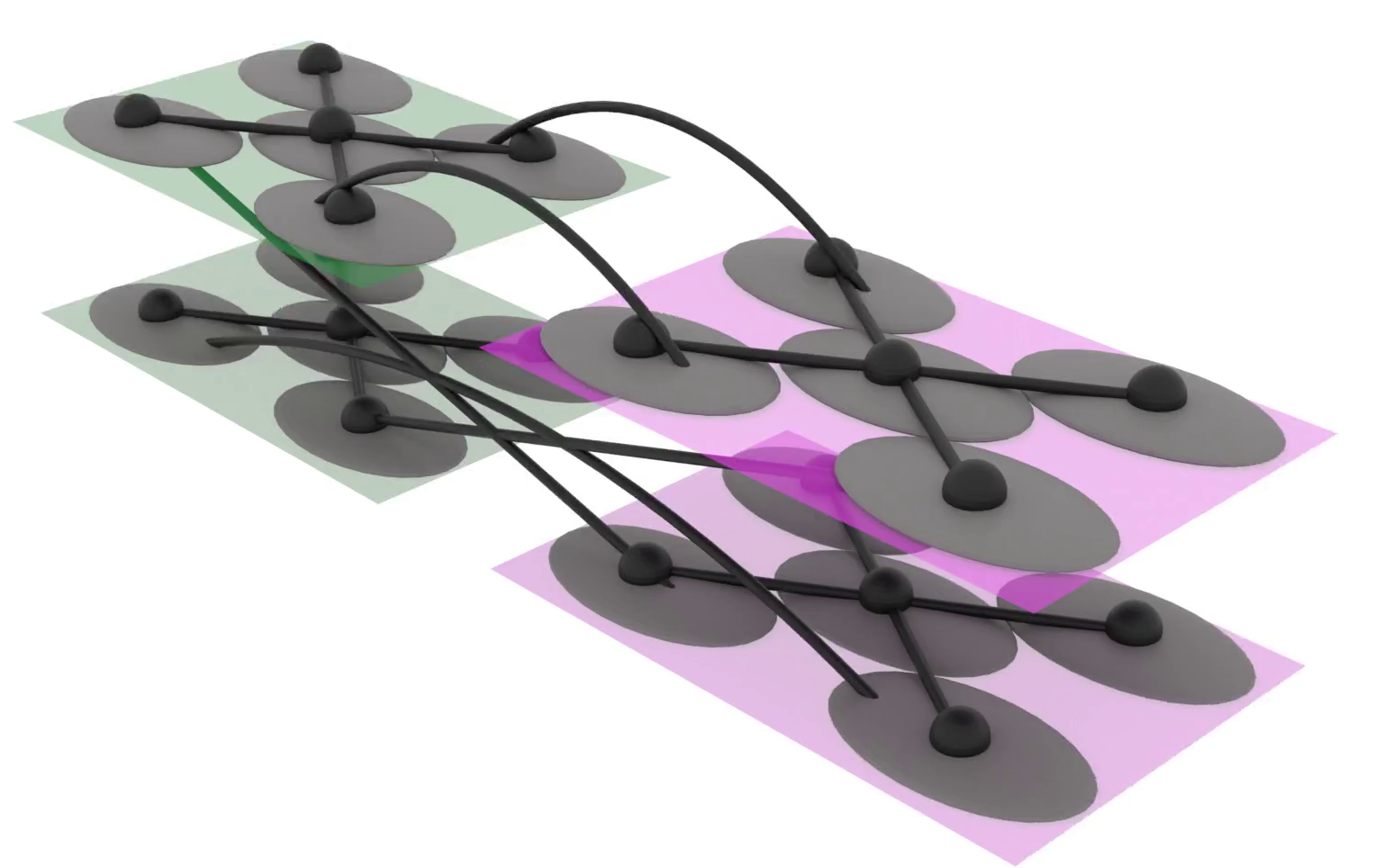
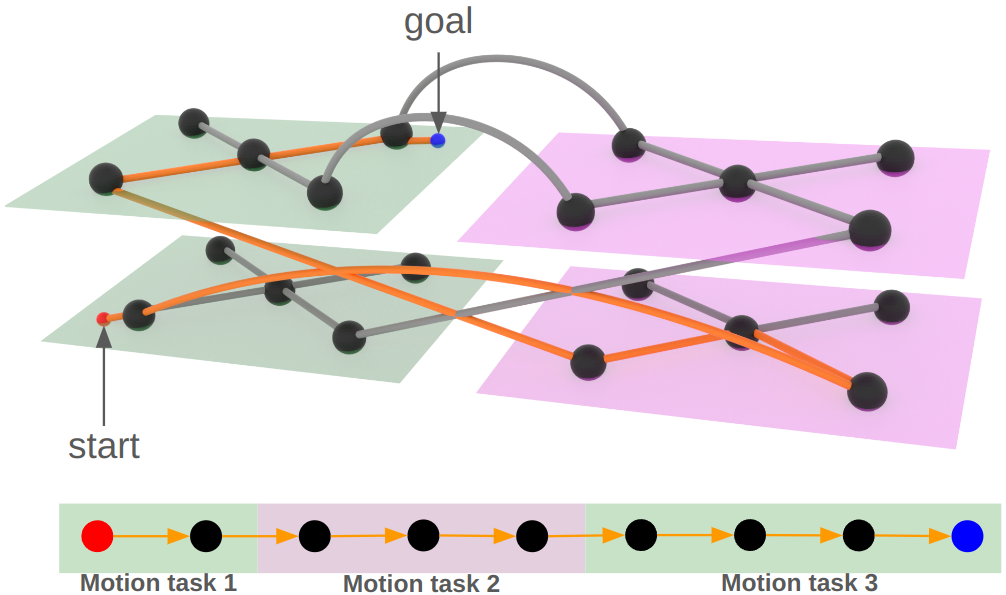
Foliated Manifolds Problem
Each task is represented by an abstract manifold structure, grouped by color for similar tasks. Vertical planes indicate un-grasping manifolds defined by placements, while horizontal planes represent sliding/transporting manifolds defined by grasp poses. For Sliding Cup, each green plane is defined by sliding the cup with a certain grasp.
Real World Experiment
To showcase the feasibility of our planner, we conducted real-world tests using a Fetch Robot to perform two tasks: opening a drawer and pouring water. We assume that the locations of objects involved in these tasks are known in advance. The number of manifolds and intersections are generated similar to the simulation experiments. As seen in the figure, the robot is capable of planning and executing these plans in the real world.
BibTeX
@inproceedings{
hu2024efficient,
title={Efficient Motion Planning in Foliated Manifolds},
author={Hu, Jiaming and Iyer, Shrutheesh Raman and Wang, Jiawei and Christensen, Henrik I},
booktitle={Robotics: Science and Systems},
year={2024},
}